Air Hockey Robot
I designed a 3 degree-of-freedom arm robot to play air hockey via an overhead camera as my final project for this course.
Learn More
Object Tracking
Implemented a Kalman Filter to track vehicles on a highway with YOLOv3.
View on GitHubSemantic Segmentation
Used DeepLabv3 model to perform semantic segmentation on images.
View on GitHub
Instance Segmentation
Iterated on semantic segmentation assignment to filter by instance.
View on GitHub
Feature Matching
Applied Harris Corner Detection to extract features from images and used ORB for feature matching to identify the closest matching images.
View on GitHub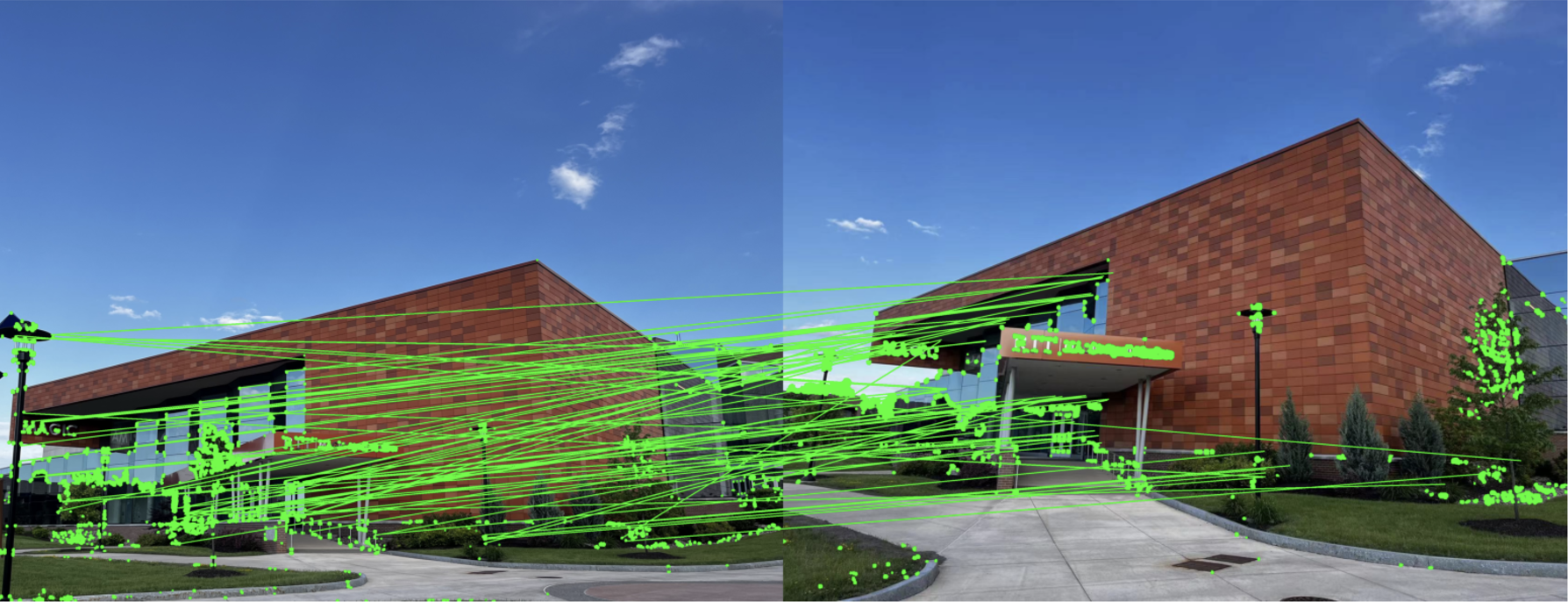
Autonomous Driving Midterm
Trained an autonomous driving simulation model using augmented perception data.
View on GithubSemantic Tracking Final Exam
Semantic tracking on a track runner during a race.
View Presentation View on GitHub