Underwater Robot Motherboard
Custom-designed PCB to manage power distribution, sensor integration, and motor control for an underwater robot.
This motherboard was a custom-designed 2-layer PCB for my multidisciplinary senior design project, an underwater robot. It serves as the central hub for power management, sensor data acquisition, and motor control. It was designed as a cape pcb for an STM32 nucleo board.
The design includes:
- Power distribution from the battery with 12-5V buck converter and 5-3.3V LDO
- High-current H-bridge to drive brushed DC motor for a propeller
- Hardware interfaces for the following peripherals:
- Two cameras
- Dissolved oxygen sensor
- Ethernet controller
- IMU
- pH probe
- Salinity sensor
- Servo
- Thermistor
- Designed using Altium Designer and hand soldered SMT components
Final PCB Design

Assembly under a microscope.
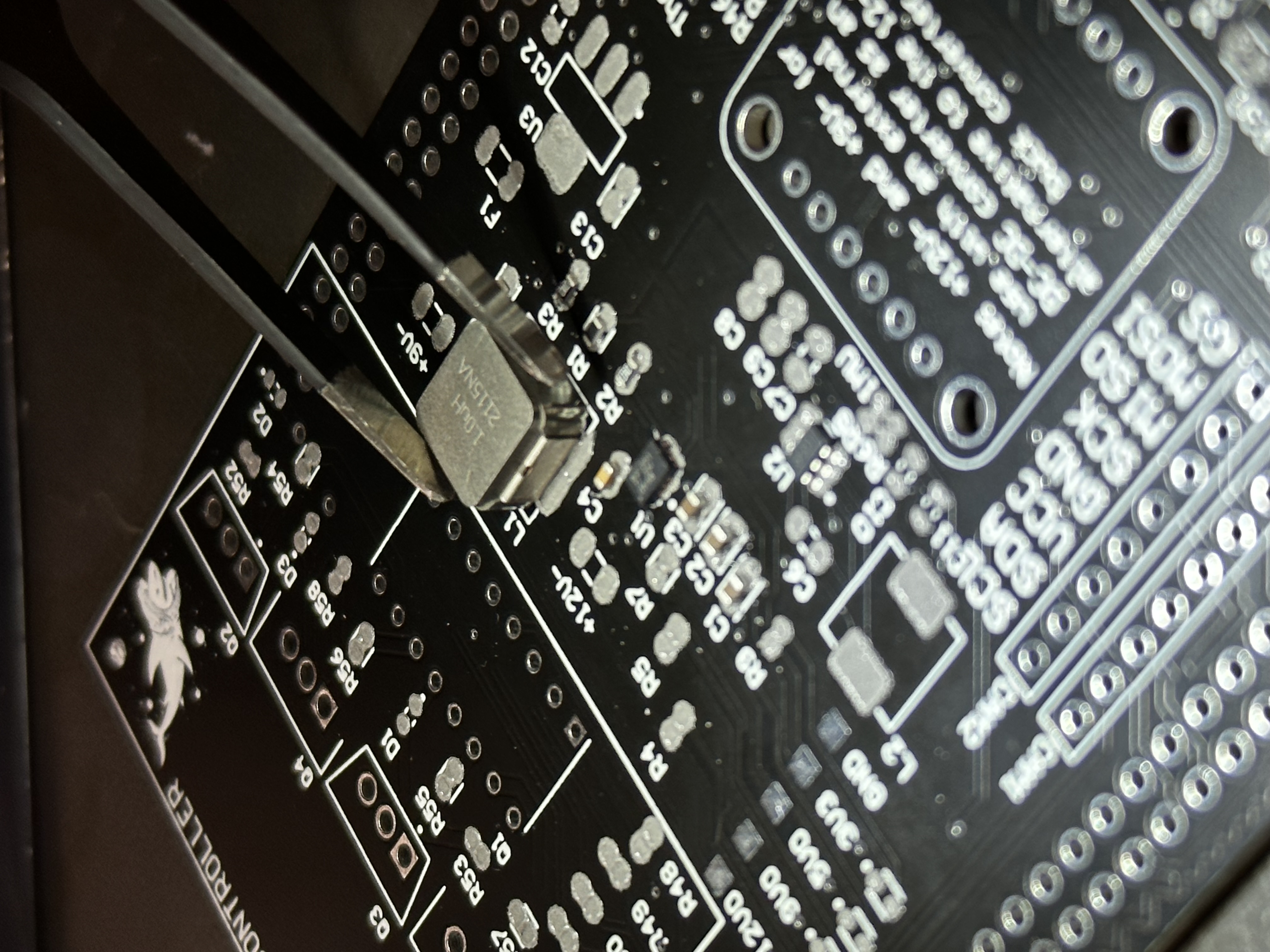
Close-up of soldered components.
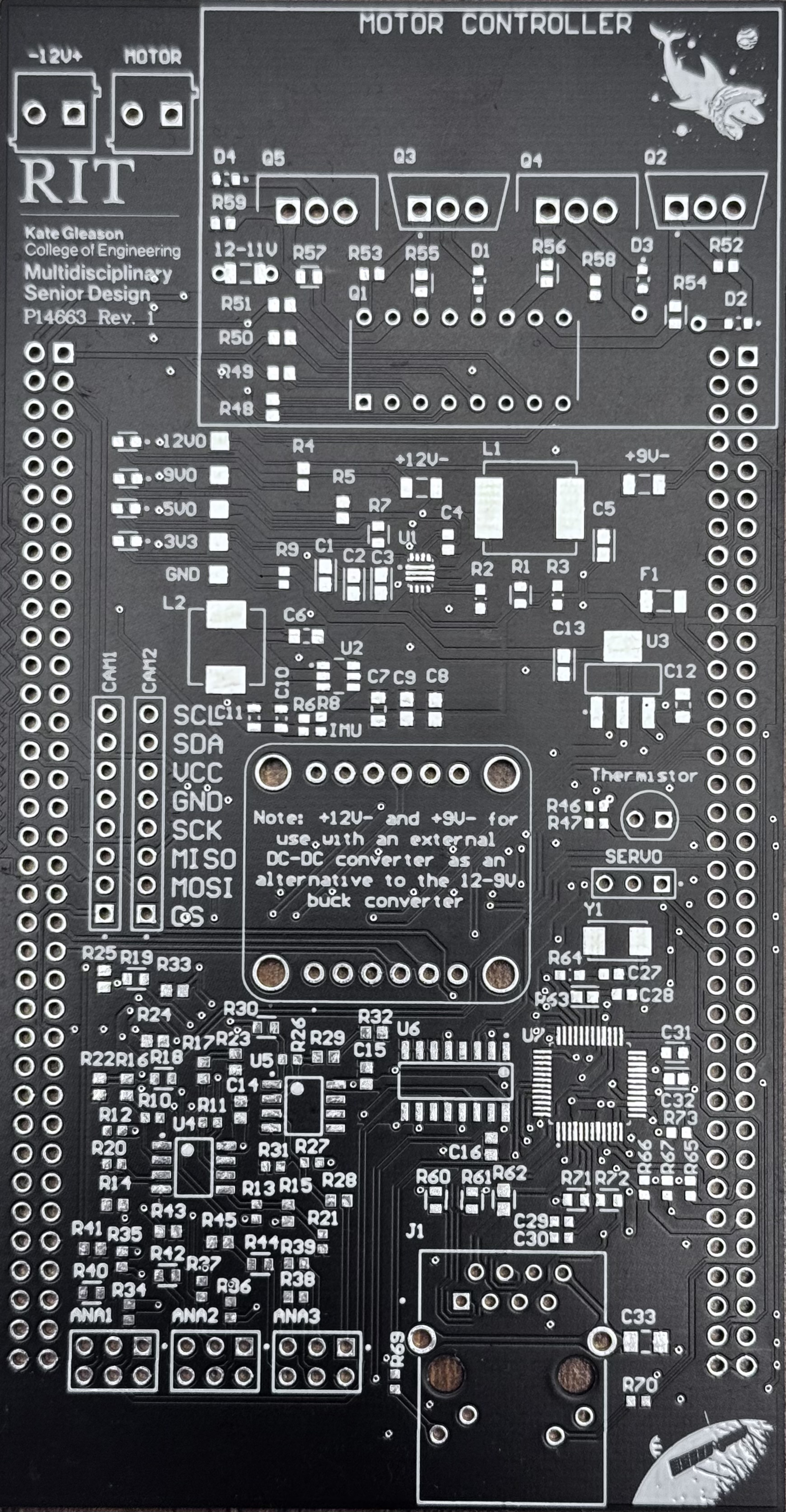
Final PCB layout.
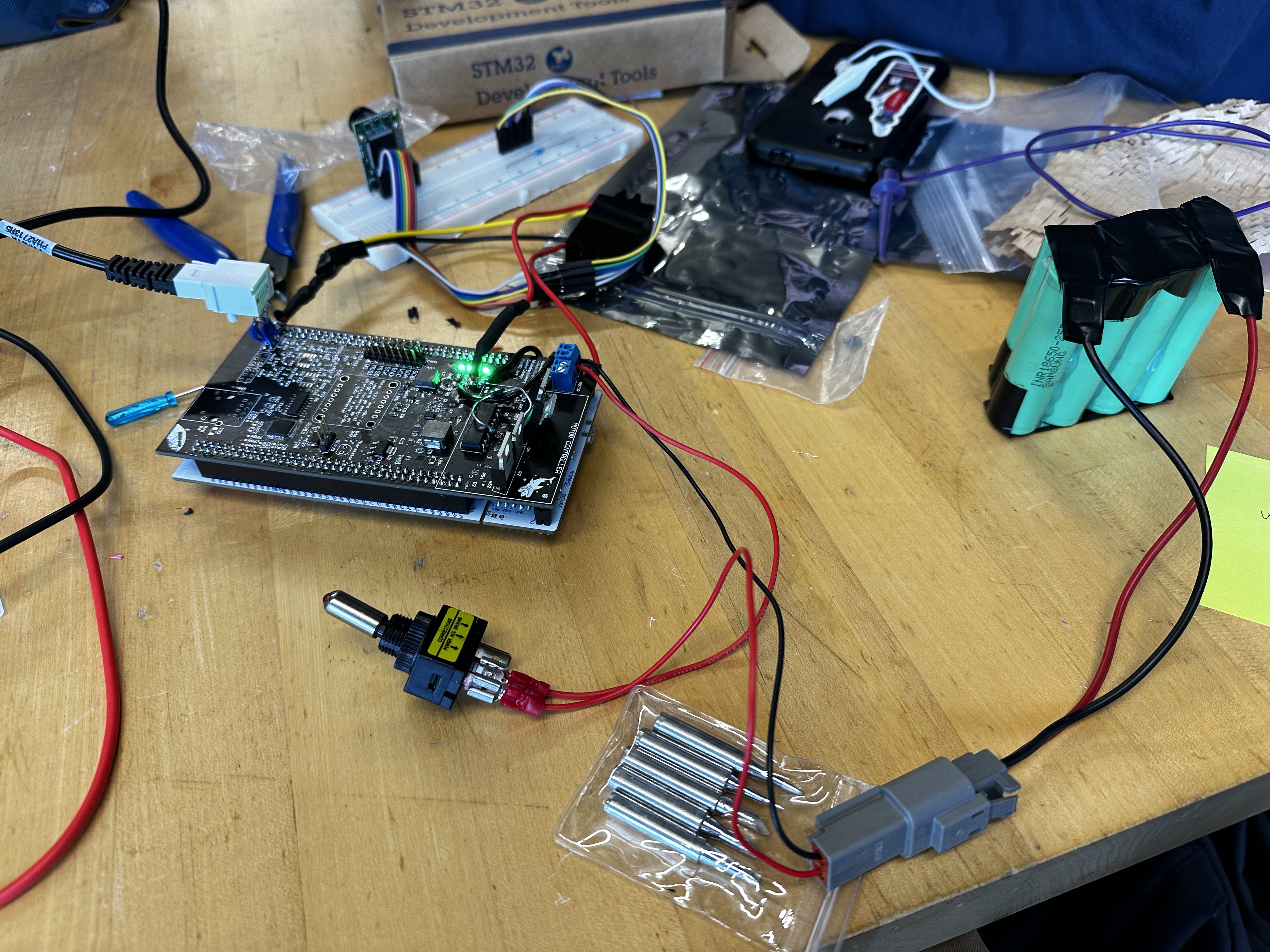
Testing with a sensor.